10 Jahre Roboter
Während meines Studiums hatte ich mir in den Kopf gesetzt einen Roboter zu bauen (das war jetzt wahrscheinlich 12 Jahre her). Er sollte auf Rädern fahren, möglichst selbstständig Räume erkunden und seine eigene Ladestation finden.
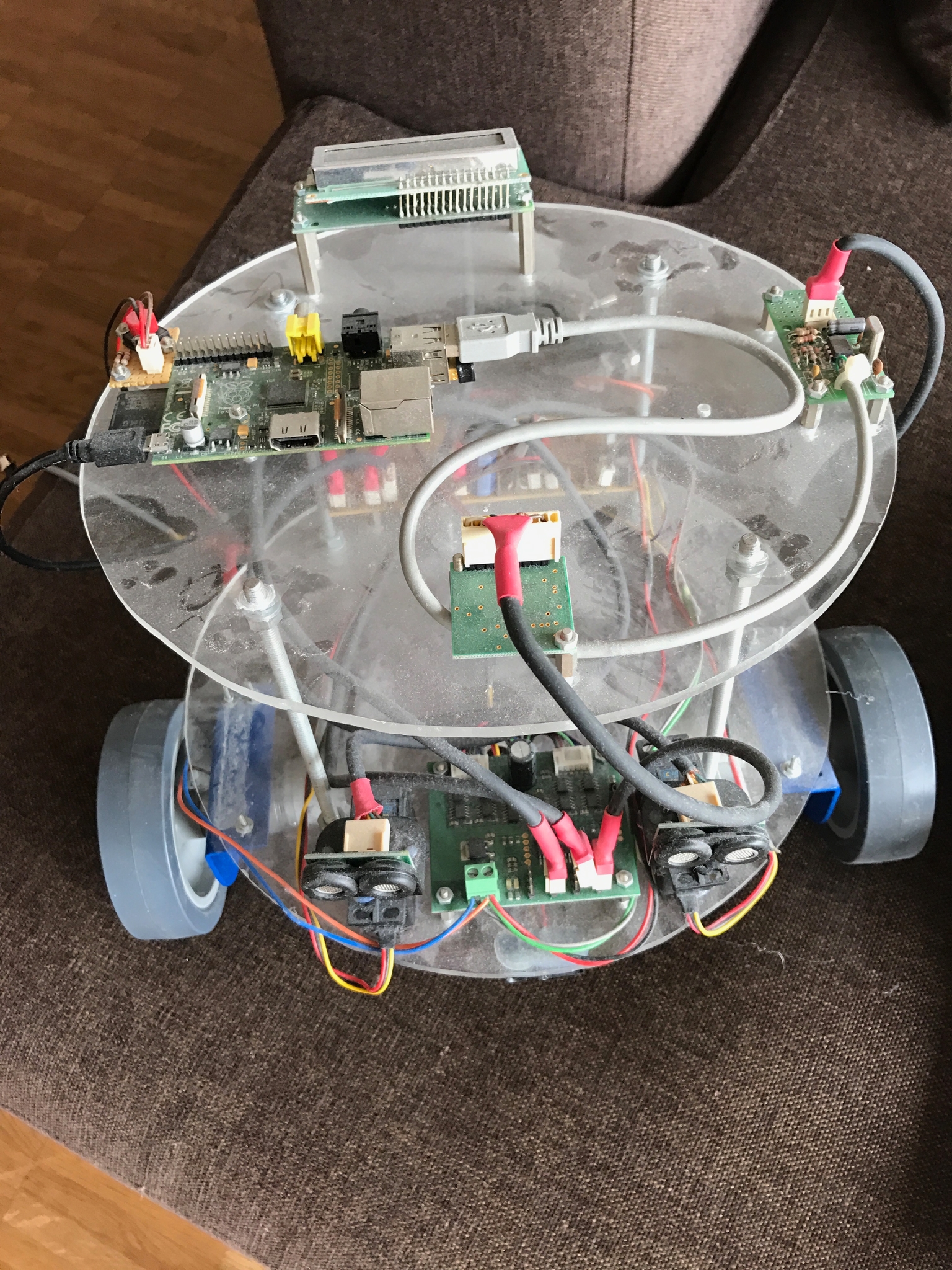
Anfangs war der Roboter noch mit Bleibatterie geplant. Daher das doppelstöckige Design. Und Anfangs sollte das “Hirn” des Roboters noch ein Router mit Openwrt sein.
Die Bleibatterie wurde irgendwann gegen einen Lipo-Akku getauscht und der Router gegen einen Raspberry Pi. Allerdings kam die Software nie richtig voran. Gerade das Mapping Problem ließ sich von mir heraus nicht ausreichend lösen. In meinem letzten Hackathon habe ich herausgefunden, dass ein Teil des Problems auch die unzureichende Genauigkeit der Ultraschallsensoren ist. Da ich jetzt nicht noch einen Laserscanner einbauen wollte, habe ich mich dafür entschieden den Roboter bis auf weiteres komplett auf Eis zu legen und habe ihn daher am Wochenende zerlegt.
Das war tatsächlich das Projekt an dem ich am Längsten gearbeitet habe, wenn auch mit langen Unterbrechungen.